
|
|
|
My work aimed to facilitate laparoscopic surgery using low-cost manipulators, leveraging the capabilities of the da Vinci surgical system. Implemented the kinematic Remote Center of Motion (RCM) constraint and tested my methods both in simulation (using ROS-Gazebo) and on real manipulators (KUKA LBR iiwa 7 & UR5e).To check out more the project please go to Projects section. Notably, contributed to the development of an open-source surgical platform, which is submitted and accepted to the Advances in Robotics 2025 ,where I served as the first author. Presented on july 1st week and won best paper award out of 78 papers Feel free to check out my resume and drop me an e-mail if you want to chat with me! |

|
Aug 24 - Present Working under the guidance of Prof. Milton Aguirre at SEEDS Lab, Purdue . Build a 3-DOF static balancing manipulator that compensates for gravitational torque. Designed and built a compliant gripper and an algorithm for estimating the force on the end effector using image feedback from compliance in grasping applications. Designed and assembled a rigid and compliant prosthetic arm with a custom trigger and Dynamixel motor for control. |
|
|
Dec 22 - May 24 Worked under the supervision of Professor Nirav Patel. Developed a mathematical method to apply a software-based Remote Center of Motion (RCM) constraint for Robotic-Assisted Minimally Invasive Surgery (RAMIS) in task space for 5+ DOF manipulators. For Letter Of Recommendation please mail [Professor Nirav Patel] |

|
March 22 - Oct 22 Worked under the supervision of Professor Harish P. M at SysIDEA Robotics lab, IITGN on FPGA-based current control for 2-DOF planar manipulator setup, utilizing Iterative Learning Control and PD controller equations to analyze human motor control properties, such as savings, retentions, generalization, interference, and spontaneous reactions. For Letter of Recommendation , [LOR Link] . |
|
[GitHub] [Gazebo Community metting] [Linkedin award announcement] [Video explaination] This challenge was orginazied by Freelancer on behalf of NASA - National Aeronautics and Space Administration, in collaboration with Matt Hansen and Ibility LLC, and with support from #ROS2 and Open Robotics community. I won Honorable mention award and cash price of 400$. [Link to Certificate]. The Package offers a comprehensive simulation of NASA's upcoming CADRE mission, which is an initiative scheduled for Spring 2026. The package includes a highly realistic lunar environment designed in Blender, configured using real-world NASA data. The CAD model of the CADRE rover was developed from scratch in SolidWorks and integrated into ROS 2 Humble. It also supports advanced features like point cloud-based lunar mapping, teleoperation of multiple rovers, and compatibility across various development platforms like WSL and VMware Linux. Additionally, the entire package is open-sourced, including CAD files and Blender assets, allowing for broad accessibility and future development. |

|
[challenge] [code] The Make-a-thon is an 8 weeks long online challenge bringing together engineers, technologists, lawyers, designers and business professionals to create applications that use AI to improve legal services and access to justice. Participants may use any AI models and can build products on top of the following AI models among others. It was 8-week roller-coaster journey of over 300 participants prototyping an AI product to improve the justice system during the OpenNyAI Make-a-thon and we Won 3rd place and received a grant of $1800/₹150,000. [grant Link].It is Python-based GUI, which acts as a first-level filter for the officer/institution deciding the application for appointment of an Arbitrator. " |

|
[Best paper Award] For my Final year project in Btech, I worked on a project titled “Prediction of Health Problems and Recommendation System using Machine Learning and IoT”. Main contribution and the idea was towards creating, GUI based framework where Disease will be predicted based on users symptoms. Due to biased predicted results, we came up with the idea to use 7 ML classification algorithms. [Link to the Paper] |

|
[Lint to the Robots Picture] [Lint to the Certificate] Took part in FLL 2015 and won best team work award in regionals. |
|
My research work at IIT Madras. Accepted to Advances in Robotics 2025 Developed an open-source software stack for integrating KUKA LBR iiwa7/UR5 or other 6-DOF robotic manipulators into a teleoperated surgical robotics system. The system ensures real-time enforcement of the Remote Center of Motion (RCM) constraint while offering intuitive and seamless teleoperation functionality. Will be adding the Link soon for package as soon as paper is published. |
|
This project uses deep reinforcement learning to teach an agent how to balance a pole on a cart using the Cross-Entropy Method (CEM). The implementation is built from scratch using PyTorch and the MuJoCo physics engine. It is inspired by the method presented in the book Deep Reinforcement Learning Hands-On by Maxim Lapan. Elite episodes are selected based on performance, and the policy network is updated using actions from only those successful episodes. This approach enables fast and intuitive learning, making it ideal for simple control tasks like CartPole. Future work includes implementing more advanced algorithms such as PPO and DDPG for more complex robot environments. |
|
Reinforcement learning often struggles with complex tasks because a single policy must learn multiple skills simultaneously and relies on intricate reward functions. As the number of sequential tasks increases, designing effective rewards becomes increasingly difficult. Hierarchical Reinforcement Learning (HRL) addresses this challenge by decomposing tasks into smaller sub-policies with simpler goals. A high-level policy selects which skill to execute, while low-level policies manage specific actions. This structure enables faster learning, simpler reward design, improved exploration, and more reliable performance on multi-stage tasks. We present an HRL framework that allows a quadruped robot to autonomously locate and approach door handles in a MuJoCo simulation, demonstrating the advantages of hierarchical decomposition over monolithic policies.I have presonally developed an HRL system for the Spot to approach and dynamically open the door while holding the handle. |
|
This project presents a reimplementation and analysis of "Mastering Visual Continuous Control: Improved Data-Augmented Reinforcement Learning" (DrQ-v2), a model-free algorithm that enhances Deep Deterministic Policy Gradient (DDPG) with data augmentation and modified learning targets.I have replicated the essential elements of DrQ-v2, such as N-step TD learning and random shift augmentation, and assessed its effectiveness using the CarRacing-v2 environment. According to my findings, the episode reward increased from $767$ to $901.4$, demonstrating that the combination of data augmentation with N-step returns significantly improves learning stability and ultimate performance when compared to a regular DDPG baseline. Additionally, qualitative research shows that the augmented agent effectively navigates the track, whereas the baseline policy frequently fails, often entering irreversible circular motions. The fundamental principles of DrQ-v2 are confirmed by this reimplementation study, which also emphasizes the importance of straightforward but powerful regularization strategies in visual RL. |
|
Programming two industrial cobot manipulators to complete a pick-and-place task. Programming autonomous mobile robot (AMR) to handle material transport efficiently. Integrate the cobots and AMR in NodeRED to create a fully automated workflow.
IE course project 2: Robotics Grasping Manipulation
Programmed and integrated an industrial robot system in both simulation (CoppeliaSim) and real hardware to perform vision-guided tasks such as object grasping and visual servoing for object tracking.
IE course Final project 3: Autonomous self-driving lab
The main goal is to design an autonomous robotic system capable of performing lab tasks with minimal supervision. Specific aims include: Autonomous Navigation & Safety – Develop obstacle-avoidance and path-planning algorithms for safe operation in lab environments. Computer Vision-Driven Experimentation – Implement Deep learning models to detect and segment the test tubes and find the color in real time. Dual Manipulation – Dual robotic arm with grippers to handle diverse lab equipment. Realistic Lab scene - Create a chemistry laboratory scene to test all the pipelines. |
|
[GitHub] Objective: Developed a ROS-based simulation for NASA's planned CADRE trio mission to map the Moon, scheduled for Spring 2025. Lunar Landscape Design: Created a lunar environment using Blender, based on publicly available lunar images from NASA’s gallery (https://science.nasa.gov/gallery/moon-images/). Configured world parameters such as gravity, atmosphere, and pressure using data from NASA’s planetary factsheet for gazebo (https://nssdc.gsfc.nasa.gov/planetary/factsheet/moonfact.html). CAD Model Development: Constructed the CAD model of the CADRE rover from scratch using images and information from NASA JPL’s website (https://www.jpl.nasa.gov/missions/cadre). Implemented the model in SolidWorks and converted it to URDF format for use with ROS2 Humble. Simulation and Integration: Integrated rover controls, IMU, LRF, and RGBD sensors for lunar mapping within the simulation. Developed Python code to utilize point cloud data for mapping in relation to the Lander. Teleoperation and Control: Created a Python GUI for teleoperation control of individual rovers, including camera visualization. Set up ROS2 launch files to facilitate spawning multiple rovers as needed. Cross-Platform Compatibility: Tested the simulation on Windows Subsystem for Linux (WSL) and VMware Linux, ensuring compatibility for developers who do not wish to dual boot or have access to a Linux environment. Open-sourced : Open-sourced SolidWorks CAD files, Blender files. |
|
A open-source Python ROS2 package to use sampling-based planning algorithms such as Astar RRT, RRT* to control any mobile Robots. will be adding the Link soon for code. |
|
Engineered a 2-DOF U-Arm static balancing manipulator that compensates for gravitational torque using couter weights. Re-Engineered with motors to measure the current with and without weights as shown in the video. |
|
we built a robot from scratch, applying various concepts from both the lab and theory, such as finite state machines, sensors, actuators, filters, and more. Specifically, I worked on the Flywheel launcher, while other team members worked on other subsystems. |
|
Designed and built a compliant gripper and an algorithm for estimating the force on the end effector using image feedback from compliance in grasping applications. 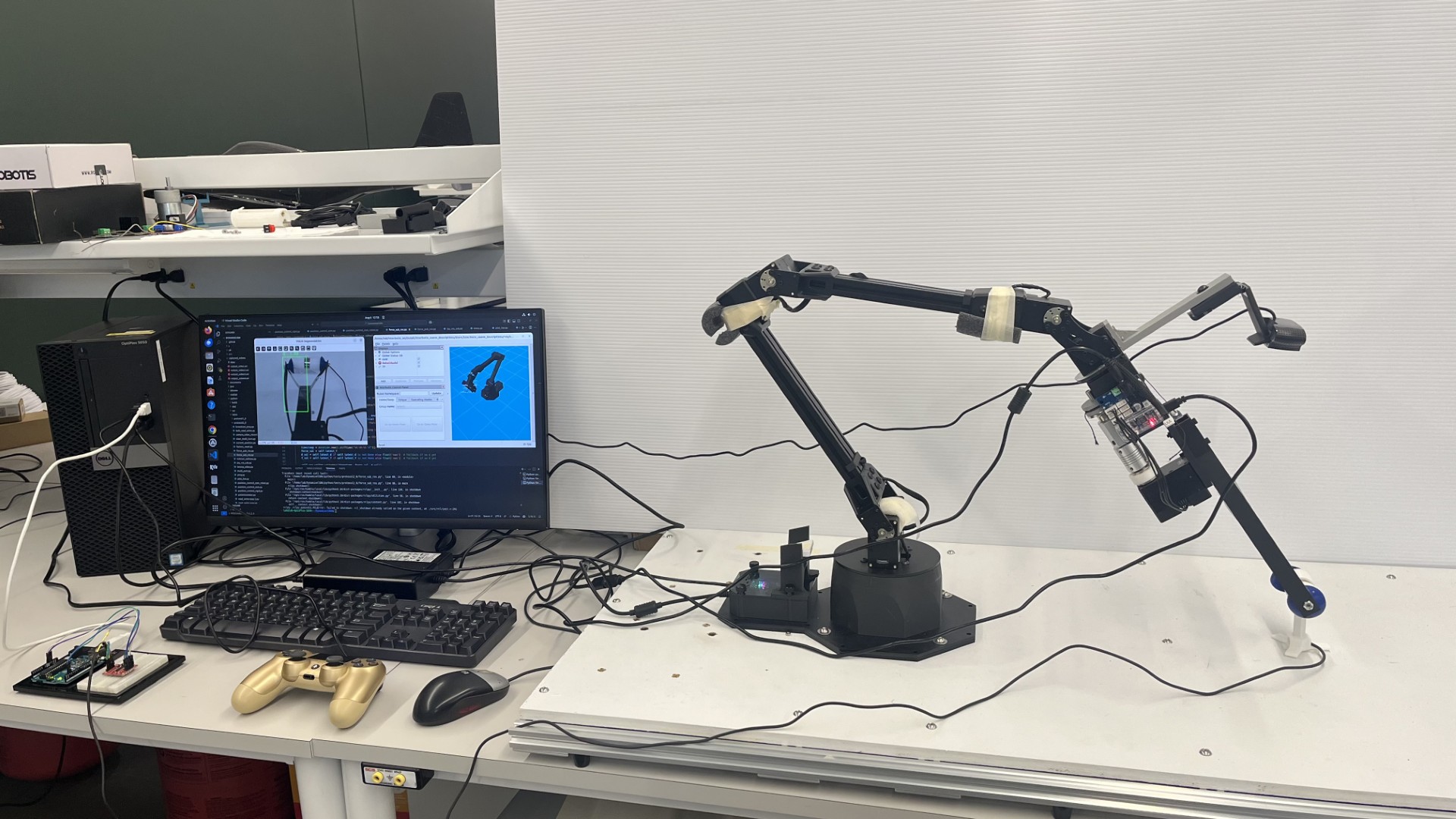
|
This template is a modification to Jon Barron's website.